 Книги
Книги Техника
Техника Электроника
Электроника Контроллеры
Контроллеры Шаговые двигатели
Шаговые двигатели Контроллеры Raspberry Pi
Контроллеры Raspberry Pi Все теги
Все теги Программирование
Программирование Вооружение
Вооружение Проекты
ПроектыПлавный пуск двигателя постоянного тока с использованием таймеров
Серия-статей: Arduino, использование двигателей постоянного тока #2
Решить проблему пусковых токов можно плавным повышением скорости. Т.е. вместо мгновенного разгона двигатель будет разгоняться постепенно, при этом сглаживая пик потребления тока в момент пуска.
Подключим двигатель к motor-shield на безе L298P, как и в предыдущем примере: 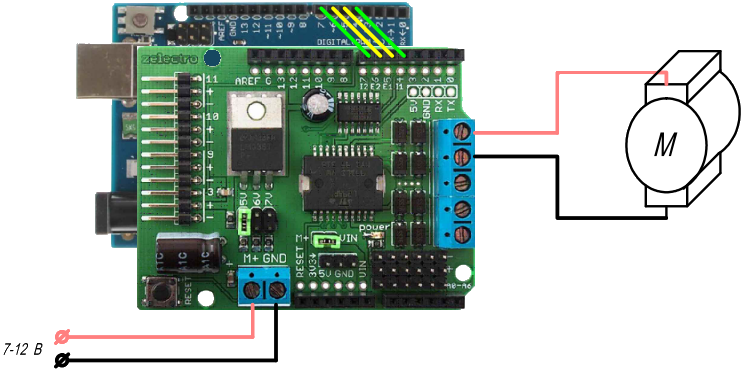
Не забываем, что двигатель не имеет обатной связи, поэтому для контроля текущей скорости воспользуемя дополнительной переменной motorPower
byte E1=5; // Управление скоростью двигателя – подключение к 5 выходу
byte I1=4; // Управление направлением вращения – подключение к 4 выходу
unsigned long StartTimer; // Таймер для плавного пуска
int StartTimeStep=2; // Интервал изменения мощности двигателя, в мс
int StartPowerStep=1; // Один шаг изменения мощности двигателя
int motorPower; // Мощность двигателя
void setup()
{
pinMode (E1, OUTPUT); // Задаем работу соответствующих пинов в качестве выходов
pinMode (I1, OUTPUT);
motorPower=0; // Начальная мощность - 0
}
void loop()
{
digitalWrite (I1, HIGH); // На вывод I1 подан высокий логический уровень, мотор вращается в одну сторону
for (motorPower=0;motorPower<255;motorPower+=StartPowerStep) // Увеличиваем скорость до тех пор, пока не достигнем максимума
{
analogWrite (E1, motorPower); // На выводе ENABLE управляющий сигнал с новой скоростью
delay(StartTimeStep);
}
}
Теперь двигатель разгоняется более плавно. Разгон от 0 до 255 займет почти пол секунды, а установить интервал изменения в 1 мс – то вообще за четверть секунды. Невооруженным глазом разница не очень заметна. Но такое разгон намного более щадящий для силовой части. К тому-же скорость разгона мы можем регулировать, добиваясь нужного ускорения.
Вот только использование delay() не дает использовать параллельно
никаких других действий, поэтому реализуем плавный пуск с помощью таймеров, как при плавном движеним сервоприводов.
byte E1=5; // Управление скоростью двигателя – подключение к 5 выходу
byte I1=4; // Управление направлением вращения – подключение к 4 выходу
unsigned long StartTimer; // счетчик время для плавного пуска
int StartTimeStep=2; // Интервал изменения мощности двигателя, в мс
int StartPowerStep=1; // Один шаг изменения мощности двигателя
int motorPower; // Мощность двигателя
void setup()
{
pinMode (E1, OUTPUT); // Задаем работу соответствующих пинов в качестве выходов
pinMode (I1, OUTPUT);
motorPower=0; // Начальная мощность - 0
}
void loop()
{
digitalWrite (I1, HIGH); // На вывод I1 подан высокий логический уровень, мотор вращается в одну сторону
if (motorPower<255) // Увеличиваем скорость до тех пор, пока не достигнем максимума
if ((millis()-StartTimer)>= StartTimeStep) // Проверяем, сколько прошло с последнего изменения скорости
// если больше, чем заданный интервал – увеличим скорость еще на один шаг
{
motorPower+= StartPowerStep; // увеличение скорости
analogWrite (E1, motorPower); // На выводе ENABLE управляющий сигнал с новой скоростью
StartTimer=millis(); // Начало нового шага
}
}
Теперь двигатель разгоняется плавно, причем параллельно с разгоном можно выполнять любые другие действия