 Книги
Книги Техника
Техника Электроника
Электроника Контроллеры
Контроллеры Шаговые двигатели
Шаговые двигатели Контроллеры Raspberry Pi
Контроллеры Raspberry Pi Реле
Реле Температурный датчик
Температурный датчик Ангалоговые датчики
Ангалоговые датчики Цифровые датчики
Цифровые датчики АЦП
АЦП Bluetooth
Bluetooth Радиосвязь 2,4ГГц
Радиосвязь 2,4ГГц Жидкокристаллический экран
Жидкокристаллический экран Все теги
Все теги Программирование
Программирование Вооружение
Вооружение Проекты
ПроектыДвигатели постоянного тока
Использование двигателей постоянного тока как наиболее распространенного типа приводов.
Двигатели постоянного тока достаточно легкие, имеют большой крутящий момент и при этом позволяют регулировать частоту вращения в большом диапазоне
В обычном режиме двигатель может быть просто подключен к сети постоянного тока. Но если нужно обеспечить плавный пуск, регулирование частоты вращения и удобное управление - наиболее оптимально подключать их через отдельный контроллер двигателя, который будет обеспечивать все необходимые функции
Cистема дистанционного беспроводного управления двигателем для поворота камер видеонаблюдения, открытия ворот, жалюзи или солнеч
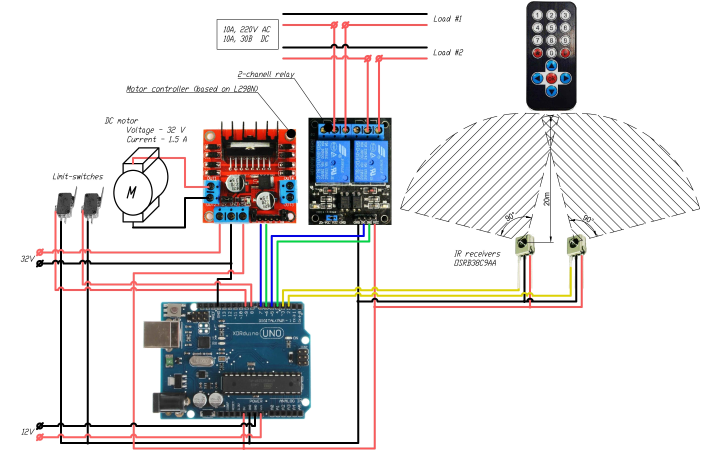
С помощью инфракрасных приемников и пульта управления обеспечивается дистанционное управление электрооборудованием. Система контролирует как штатное электрооборудование в режиме включения/выключения, так и движение/поворот (с помощью электродвигателя)
Автоматический трекер солнца для поворота солнечной панели на основе измерения освещенности
Система установлена на солнечных батареях с механизмом вращения на основе двигателя постоянного тока. Предназначен для поворота солнечной панели в сторону более высокой освещенности для максимизации светового потока. На панели расположены два датчика освещенности – под углом к сторонам вращения. Если освещенность на левом или правом датчике выше на определенную величину, панель повернется в этом направлении.
Мобильная платформа для испытаний электродвигателей

Мобильная платформа для испытаний электродвигателей. Позволяет в реальном времени контролировать движение платформы, которая движется по испытательному маршруту и снимать параметры с датчиков
Создание собственной библиотеки управления двигателем постоянного тока
Серия-статей: Создание библиотек для Arduino #2
Серия-статей: Arduino, использование двигателей постоянного тока #4
Мы создали класс для управления двигателем постоянного тока. Но если мы хотим применять его в нескольких проектах, то для каждого нужно будет скопировать один и тот-же код Поэтому есть смысл выделить весь повторяющийся код в отдельную библиотеку, которую будем подключать так-же, как и стандартные библиотеки Arduino
Создание класса для работы с двигателем постоянного тока
Серия-статей: Arduino, использование двигателей постоянного тока #3
Один контроллер может управлять несколькими двигателями постоянного тока. Поскольку код управления будет тот-же самый, то есть выделить для него отдельный класс. Тогда при добавлении новго двигателя достаточно будет добавить всего нескольких строк, а не копировать одинаковые функции и пременные для каждого.
Плавный пуск двигателя постоянного тока с использованием таймеров
Серия-статей: Arduino, использование двигателей постоянного тока #2
При управлении двигателями постоянного тока иногда возникает необходимость резкого изменения скорости (на пример пуск c 0% на 100% мощности или изменение скорости на протвоположную). Но такой режим работы двигателя требует очень высоких токов – в несколько раз больше, чем простое движение. Реализуем плавный пуск двигателя, для этого попробуем использовать как стандартную функцию задержки delay(), так и таймеры
Подключаем двигатель постоянного тока. Микросхема L298P
Серия-статей: Программирование Arduino с нуля #7
Серия-статей: Arduino, использование двигателей постоянного тока #1
Рассмотрим вариант подключения к контроллеру обычного двигателя постоянного тока, который можно использовать, например, для передвижения робота или выполнения полезной работы. Для этого воспользуемся контроллером двигателя на базе распространенной микросхемы L298P