 Книжки
Книжки Техніка
Техніка Електроніка
Електроніка Двигуни постійного струму
Двигуни постійного струму Контролери Raspberry Pi
Контролери Raspberry Pi  Усі теги
Усі теги Програмування
Програмування Озброєння
Озброєння Проекти
ПроектиПлавний пуск двигуна постійного струму з використанням таймерів
Серія-статей: Ардуїно, використання двигунів постійного струму #2
Вирішити проблему пускових струмів можна плавним підвищенням швидкості. Тобто. замість миттєвого розгону двигун розганятиметься поступово, при цьому згладжуючи пік споживання струму в момент пуску.
Підключимо двигун до motor-shield на безе L298P, як і в попередньому прикладі: 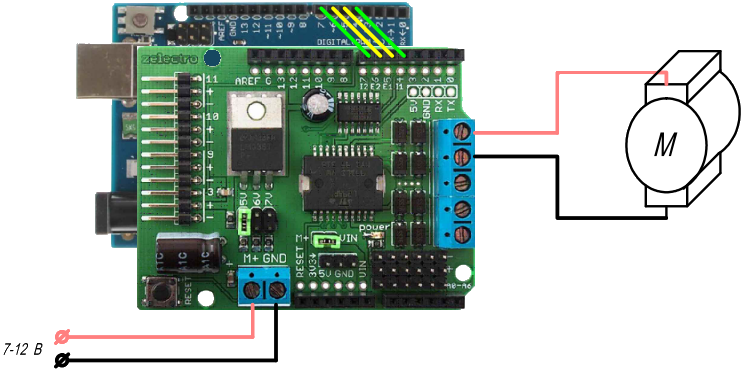
Не забуваємо, що двигун не має обатного зв'язку, тому для контролю поточної швидкості скориставшись додатковою змінною motorPower
byte E1 = 5; // Управління швидкістю двигуна - підключення до 5 виходу
byte I1 = 4; // Управління напрямом обертання - підключення до 4 виходу
unsigned long StartTimer; // Таймер для плавного запуску
int StartTimeStep=2; // Інтервал зміни потужності двигуна, мс
int StartPowerStep=1; // Один крок зміни потужності двигуна
int motorPower; // Потужність двигуна
void setup()
{
pinMode (E1, OUTPUT); // Задаємо роботу відповідних пінів як виходи
pinMode (I1, OUTPUT);
motorPower=0; // Початкова потужність – 0
}
void loop()
{
digitalWrite (I1, HIGH); // На висновок I1 подано високий логічний рівень, двигун обертається в один бік
for (motorPower=0;motorPower<255;motorPower+=StartPowerStep) // Збільшуємо швидкість до тих пір, поки не досягнемо максимуму
{
analogWrite (E1, motorPower); // На виводі ENABLE керуючий сигнал із новою швидкістю
delay (StartTimeStep);
}
}
Тепер двигун розганяється плавніше. Розгін від 0 до 255 займе майже пів секунди, а встановити інтервал зміни в 1 мс - взагалі за чверть секунди. Неозброєним оком різниця не дуже помітна. Але таке розгін набагато більш щадний для силової частини. До того ж швидкість розгону ми можемо регулювати, домагаючись необхідного прискорення.
Ось тільки використання delay() не дає використовувати паралельно
ніяких інших дій, тому реалізуємо плавний пуск за допомогою таймерів, як при {{a|https://techi-news.com/%D0%90%D1%80%D0%B4%D1%83%D1%97%D0%BD%D0%BE/%D0%9D%D0%B5%D0%B7%D0%B0%D0%BB%D0%B5%D0%B6%D0%BD%D0%B5_%D0%BA%D0%B5%D1%80%D1%83%D0%B2%D0%B0%D0%BD%D0%BD%D1%8F_%D0%BA%D1%96%D0%BB%D1%8C%D0%BA%D0%BE%D0%BC%D0%B0_%D1%81%D0%B5%D1%80%D0%B2%D0%BE%D0%BF%D1%80%D0%B8%D0%B2%D0%BE%D0%B4%D0%B0%D0%BC%D0%B8_%D0%A2%D0%B0%D0%B9%D0%BC%D0%B5%D1%80%D0%B8|плавним рухом сервоприводів} }.
byte E1 = 5; // Управління швидкістю двигуна - підключення до 5 виходу
byte I1 = 4; // Управління напрямом обертання - підключення до 4 виходу
unsigned long StartTimer; // лічильник час для плавного пуску
int StartTimeStep=2; // Інтервал зміни потужності двигуна, мс
int StartPowerStep=1; // Один крок зміни потужності двигуна
int motorPower; // Потужність двигуна
void setup()
{
pinMode (E1, OUTPUT); // Задаємо роботу відповідних пінів як виходи
pinMode (I1, OUTPUT);
motorPower=0; // Початкова потужність – 0
}
void loop()
{
digitalWrite (I1, HIGH); // На висновок I1 подано високий логічний рівень, двигун обертається в один бік
if (motorPower<255) // Збільшуємо швидкість доти, доки не досягнемо максимуму
if ((millis()-StartTimer)>= StartTimeStep) // Перевіряємо, скільки пройшло з останньої зміни швидкості
// якщо більше, ніж заданий інтервал - збільшимо швидкість на ще один крок
{
motorPower+= StartPowerStep; // Збільшення швидкості
analogWrite (E1, motorPower); // На виводі ENABLE керуючий сигнал із новою швидкістю
StartTimer=millis(); // Початок нового кроку
}
}
Тепер двигун розганяється плавно, причому паралельно з розгоном можна виконувати будь-які інші дії