 Книжки
Книжки Техніка
Техніка Електроніка
Електроніка Двигуни постійного струму
Двигуни постійного струму Контролери Raspberry Pi
Контролери Raspberry Pi  Реле
Реле Датчик температури
Датчик температури Усі теги
Усі теги Програмування
Програмування Веб-інтерфейс
Веб-інтерфейс Графічний інтерфейс
Графічний інтерфейс Віконна програма
Віконна програма Відео
Відео Зображення
Зображення Аудіо
Аудіо Тексти
Тексти HTML
HTML Лог-файли
Лог-файли Нейронні мережі
Нейронні мережі Озброєння
Озброєння Проекти
ПроектиСтворення власної бібліотеки управління сервоприводом
Серия-статей: Ардуіно, використання сервоприводів #6
Отже, заходимо до папки /libraries нашого середовища розробки Arduino, і бачимо 10-15 папок, кожна з яких відвіяє за стандартну бібліотеку Arduino. Створимо тут папку для нашої бібліотеки, наприклад, ServoClass. Усередині цієї папки створимо два файли: ServoS.h, ServoS.cpp. На жаль, середовище Arduino IDE не підтримує редагування файлів з роздільною здатністю, відмінною від .ino. Тому редагувати бібліотеку доведеться або в іншому середовищі розробки, яке підтримує з ++ або у звичайному текстовому редакторі з підсвічуванням синтаксису, наприклад, AkelPad.
Перший файл, ServoS.h – заголовний файл (від слова header file), тут описуватимуться сам клас, змінні та функції. При цьому тут мають лише список змінних і функцій та їх типів, без тіла самих функцій.
Скопіюємо у файл ServoS.h наш клас ServoClass, точніше лише змінні та назви функцій:
/* Користувальницька бібліотека управління сервоприводами */
#ifndef ServoS // Якщо бібліотека ще не була підключена
#define ServoS // Підключити її
#include "Arduino.h" // Використовуємо стандартну бібліотеку Arduino
#include "Servo.h" // Використовуємо стандартну бібліотеку управління сервоприводами
class ServoClass
{
public:
Servo serv; // Власне сам сервопривід, керований стандартною
// бібліотекою servo
int servPosition; // Поточна позиція сервоприводу, градусів
int posMax; // Максимально допустима межа переміщення сервоприводу, градусів
int posMin; // Мінімальна допустима межа переміщення сервоприводу, градусів
int posInit; // Вихідна позиція сервоприводу, градусів
// Змінні, які відповідають за переміщення
boolean move; // Чи повинен рухатися сервопривід зараз
int movePosition; // Позиція, яку має прийняти сервопривід, градуси
float moveSpeed; // Швидкість, з якою сервопривод повинен рухатися, об/хв
int moveIncrement; // Зміна положення за один інтервал часу, градусів
int moveInterval; // Інтервал між рухами для забезпечення швидкості, мілісекунди
unsigned long lastTimeCheck; // Час останнього руху сервоприводу, мс від початку роботи програми
ServoClass(); // Конструктор класу
void AttachServo (int pin); //Ініціалізація сервоприводу із зазначенням лише номери виходу для підключення
void AttachServo (int pin, int minpos, int maxpos, int initpos); //Ініціалізація сервоприводу із зазначенням мінімальної, максимальної та вихідної позиції
int PositionCheck(int movepos); // Перевірка, чи позиція попадає в заданий інтервал
void MoveTo (int movepos); // Подати команду на переміщення сервоприводу
void MoveTo (int movepos, float movespeed) ; // Подати команду на переміщення сервоприводу із зазначенням швидкості
void Update(); //Обробка переміщень
};
#endif
При створенні бібліотеки можна побачити деякі особливості:
Файл починається з директиви #ifndef ServoS, яка перевіряє, чи не було підключено цю бібліотеку раніше. Якщо ми ніде раніше її не підключали, то до програми буде додано код, що знаходиться між #define ServoS та #endif
Крім того ми визначаємо кілька функцій з одним ім'ям та різними аргументами. Це пов'язано з тим, що при використанні бібліотек виклик функції з меншою, ніж визначено кількістю аргументів призведе до помилок. Задати значення аргументів за умовчанням не вдасться, точніше для кожного випадку потрібно буде описати окрему функцію. Тому у нас по дві функції AttachServo та MoveTo
Тепер залишилося розібратися з файлом ServoS.cpp. Тут знаходиться код для описаних у заголовному файлі функцій. При цьому нам потрібно вказувати, до якого класу відносяться функції, що викликаються. Оскільки в нашій бібліотеці використовується клас ServoClass, всі функції будуть ставитися до нього. У випадку конструктора, ім'я якого збігається з ім'ям класу, це буде виглядати як ServoClass::ServoClass(), решта функцій – відповідно ServoClass::Ім'яФункції();
/* Користувальницька бібліотека управління сервоприводами */
#include "ServoS.h" // Підключаємо заголовний файл
ServoClass::ServoClass() // Конструктор класу
{
posMin = 0;
posMax = 180;
posInit = 0;
servPosition=0;
lastTimeCheck=millis();
}
servoClass::AttachServo (int pin) ////Ініціалізація сервоприводу із зазначенням тільки номери виходу для підключення
{
serv.attach(pin); // Підключаємо сервопривід до вказаного піна
posMin = 0; // Встановлюємо мінімальну позицію
posMax = 180; // Встановлюємо максимальну позицію
posInit = 0; // Встановлюємо вихідну позиціюservPosition = posInit; // Позиція сервоприводу повинна відповідати вихідному положенню
serv.write(servPosition); // Даємо команду змінити положення
}
servoClass::AttachServo (int pin, int minpos, int maxpos, int initpos) //Ініціалізація сервоприводу із зазначенням мінімальної, максимальної та вихідної позиції
{
serv.attach(pin); // Підключаємо сервопривід до вказаного піна
posMin = minpos; // Встановлюємо мінімальну позицію
posMax = maxpos; // Встановлюємо максимальну позицію
posInit = initpos; // Встановлюємо вихідну позицію
servPosition = posInit; // Позиція сервоприводу повинна відповідати вихідному положенню
serv.write(servPosition); // Даємо команду змінити положення
}
int ServoClass::PositionCheck(int movepos) // Перевірка, чи потрапляє позиція в заданий інтервал
{
int CheckedPos;
if (movepos<=posMin) // Якщо вказано більше значення, ніж максимальний
// межа переміщення
CheckedPos = posMin; // Рухатимемося тільки до цієї межі
else
if (movepos>=posMax) // Якщо вказано менше значення, ніж мінімальний
//Межа переміщення
CheckedPos = posMin; // Рухатимемося тільки до цієї межі
else // У будь-яких інших випадках - ми в допустимих для переміщення межах
CheckedPos =movepos; // Просто встановлюємо позицію, в яку має
return CheckedPos;
}
ServoClass::MoveTo (int movepos) // Якщо швидкість не вказана - просто даємо команду на переміщення сервоприводу
{
movePosition = PositionCheck(movepos); // Перевіряємо, чи ми виходимо за допустимі межі преміщення
serv.write(servPosition); // Даємо команду змінити положення
}
void ServoClass::MoveTo (int movepos, float movespeed) // Якщо швидкість вказана - організуємо плавне переміщення
{
movePosition = PositionCheck(movepos); // Перевіряємо, чи ми виходимо за допустимі межі преміщення
moveSpeed=movespeed; // Встановлюємо швидкість, з якою має переміщатися сервопривід
int Angle = abs (movePosition-servPosition); // На скільки має переміститися сервопривід
// незалежно від напрямку
if (movePosition >= servPosition) // Визначаємо, в який бік від поточного положення нам потрібно рухатися
moveIncrement=1; // Якщо вперед - додаватимемо один градус за один інтервал часу
else
moveIncrement=-1; // Якщо назад - то забирати
float RotationSpeed=moveSpeed*360/60; // Переводимо швидкість з оборотів за хвилину в градуси за секунду
moveInterval=(int)1000/RotationSpeed; // Обчислюємо інтервал між переміщеннями на градус.
move = true; // Даємо комнду почати плавне переміщення
}
ServoClass::Update () //// Обробка переміщень
{
if (move) // Якщо дана команда на переміщення
{
if ((millis() - lastTimeCheck)>= moveInterval) // перевіряємо, скільки минуло часу з останнього
//Дії та порівнюємо з потрібним нам інтервалом.
//Якщо часу пройшло більше - чинимо наступну дію
{
servPosition+=moveIncrement; // Змінюємо кут на раніше обчислене значення
serv.write(servPosition); // Посилаємо сервоприводу команду з новим кутом повороту
lastTimeCheck = millis (); // Оновлюємо лічильник часу, щоб наступний відлік часу почався з цього моменту
if (servPosition==movePosition) // Якщо ми досягли потрібної позиції-
move = false; // зупинити рух
}
}
}
Власне, зі створенням бібліотеки ми закінчили, залишилося підключити її до нашої програми. Для цього просто замінимо опис нашого класу з попереднього прикладу на "#include "ServoS.h"" Підключимо два сервоприводи і завантажимо скетч:
#include "Servo.h" // Підключаємо бібліотеку для роботи із сервоприводом
#include "ServoS.h" // Підключаємо користувальницьку бібліотеку для роботи з сервоприводом
ServoClass serv1;
ServoClass serv2;
void setup()
{
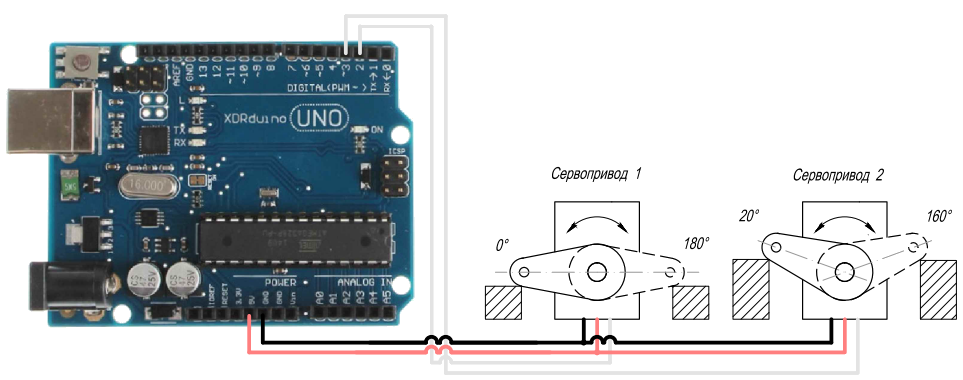
serv1.AttachServo(2); // Перший сервопривід підключений до другого піну
// Стандартні межі переміщення від 0 до 180 градусів
// Стандартне вихідне положення 0 градусів
serv2.AttachServo(3, 20, 160, 90); // Другий сервопривід підключений до третього піна
// Межі переміщення від 20 до 160 градусів
// Початкове становище - 90 градусів
serv1.MoveTo(20); // Переміщаємо перший сервопривід у положення 20 градусів
serv2.MoveTo(150, 0.5); // Переміщаємо другий сервопривід у положення 150 градусів зі швидкістю 0.5 обороту за хвилину
}
void loop()
{
serv1.Update(); // Обробляємо переміщення першого сервоприводу
serv2.Update(); // Обробляємо переміщення другого сервоприводу
}
Результат роботи програми не змінився - перший сервопривід займе вказане положення відразу, а другий повертатиметься досить повільно (його вихідне положення 90 градусів, для переміщення в положення 150 градусів потрібно повернутися на 60 градусів. Швидкість 0.5 обороту в хвилину відповідає 3 градуси в секунду, т .е переміщення займе 20 секунд).
Залишилося оформити нашу бібліотеку для зручнішого використання. Якщо використовувати Arduino IDE, то функції стандартних бібліотек підсвічуються кольором, а для нашої бібліотеки – ні. Тому потрібно повідомити програму, які функції потрібно підсвічувати, для цього потрібно створити файл keywords.txt у папці нашої бібліотеки
Помістимо туди інформацію про ключові слова, які потрібно підсвічувати:
# Підсвічування синтаксису для бібліотеки ServoS
ServoClass KEYWORD1
AttachServo KEYWORD2
PositionCheck KEYWORD2
MoveTo KEYWORD2
Update KEYWORD2
Слова, що позначені KEYWORD1 будуть підсвічені як тип даних, KEYWORD2 – як функції Між словом та його типом ставиться знак табуляції, між рядками – переклад рядка.
Знову перезавантажимо Arduino IDE, тепер наш клас та його функції підсвічуються відповідним кольором.