 Книжки
Книжки Техніка
Техніка Електроніка
Електроніка Двигуни постійного струму
Двигуни постійного струму Контролери Raspberry Pi
Контролери Raspberry Pi  Усі теги
Усі теги Програмування
Програмування Веб-інтерфейс
Веб-інтерфейс Графічний інтерфейс
Графічний інтерфейс Віконна програма
Віконна програма Відео
Відео Зображення
Зображення Аудіо
Аудіо Тексти
Тексти HTML
HTML Озброєння
Озброєння Проекти
ПроектиПрограмне обмеження переміщення сервоприводу
Серия-статей: Ардуіно, використання сервоприводів #4
AttachServo(2); буде рівнозначний AttachServo(2,0,180,0); і здійснить підключення сервоприводу до другого піну зі стандартними значеннями меж переміщення. Для цього додамо до нашого класу пару змінних posMax та posMin. Заодно подбаємо про вихідне положення сервоприводу, в якому він повинен перебувати під час запуску програми, визначимо його за допомогою змінної posInit. Встановлювати значення цих змінних одночасно з ініціалізацією сервоприводу, для цього додамо в функцію AttachServo ще три аргументи:
void AttachServo (int pin, int minpos=0, int maxpos=180, int initpos=0)
Приклад ініціалізації сервоприводів із межами переміщення:
void setup()
{
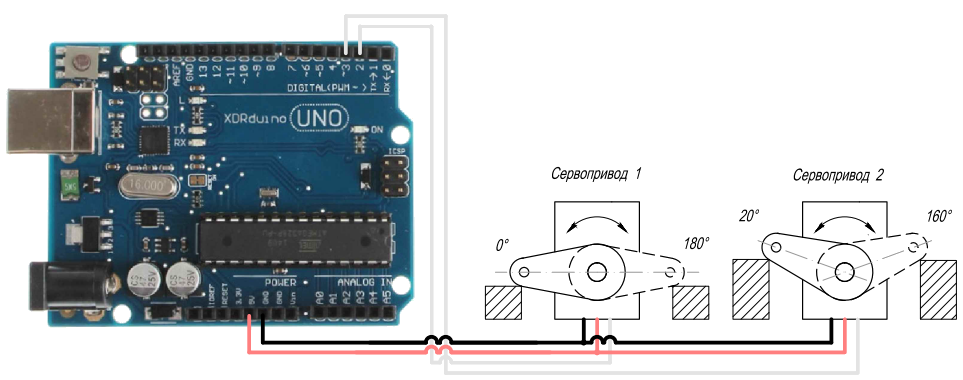
serv1.AttachServo(2); // До другого піну підключений перший сервопривід
// Стандартні межі переміщення від 0 до 180 градусів
// Стандартне вихідне положення 0 градусів
serv2.AttachServo(3, 20, 160, 90); // До третього піну підключений другий сервопривід
// Межі переміщення від 20 до 160 градусів
// Початкове становище - 90 градусів
}
Тепер створимо функцію MoveTo, за допомогою якої керуватимемо рухом сервоприводу. У найпростішому варіанті нам потрібно буде просто перемістити сервопривід у потрібне положення. Для цього просто викличемо цю функцію з одним аргументом - потрібним нам положенням, наприклад, serv1.MoveTo(20); дасть команду першому сервоприводу повернутися в положення 20 градусів. Оскільки ми раніше встановили максимальні та мінімальні межі переміщення, то спроба викликати функцію з неправильним кутом - serv2.MoveTo(220); Приведе до того, що сервопривід повернеться до встановленого максимального значення 160 градусів і зупиниться.
Ось що в нас вийшло:
//Управління сервоприводами за допомогою класу користувача, завдання
// Переміщення за допомогою виклику однієї функції з програмним обмеженням переміщень
#include
// Підключаємо бібліотеку для роботи із сервоприводом class ServoClass
{
Servo serv; // Власне сам сервопривід, керований стандартною бібліотекою servo
int servPosition;// Поточна позиція сервоприводу, градусів
int posMax; // Максимально допустима межа переміщення сервоприводу, градусів
int posMin; // Мінімальна допустима межа переміщення сервоприводу, градусів
int posInit; // Вихідна позиція сервоприводу, градусів
public:
ServoClass ()
{
posMin = 0; // Встановлюємо значення за умовчанням
posMax = 180;
posInit = 0;
servPosition=0;
}
void AttachServo (int pin, int minpos=0, int maxpos=180, int initpos=0)
{
serv.attach(pin); // Підключаємо сервопривід до вказаного піна
posMin = minpos; // Встановлюємо мінімальну позицію
posMax = maxpos; // Встановлюємо максимальну позицію
posInit = initpos; // Встановлюємо вихідну позицію
servPosition = posInit; // Позиція сервоприводу повинна відповідати вихідному положенню
serv.write(servPosition); // Даємо команду змінити положення
}
void MoveTo (int movepos) // Даємо команду на переміщення сервоприводу
{
// Перевіряємо, чи ми виходимо за допустимі межі преміщення
if (movepos<=posMin) // Якщо вказано більше значення, ніж максимальний
// межа переміщення
movePosition=posMin; // Рухатимемося тільки до цієї межі
else
if (movepos>=posMax) // Якщо вказано менше значення, ніж мінімальний
//Межа переміщення
movePosition=posMin; // Рухатимемося тільки до цієї межі
else // У будь-яких інших випадках - ми в допустимих для переміщення межах
movePosition=movepos; // Просто встановлюємо позицію, в яку має
// Перемістити сервопривід
serv.write(servPosition); // Даємо команду змінити положення
}
};
ServoClass serv1; // перший сервопривід
ServoClass serv2;
void setup()
{
serv1.AttachServo(2); // Перший сервопривід підключений до другого піну
// Стандартні межі переміщення від 0 до 180 градусів
// Стандартне вихідне положення 0 градусів
serv2.AttachServo(3, 20, 160, 90); // Другий сервопривід підключений до третього піна
// Межі переміщення від 20 до 160 градусів
// Початкове становище - 90 градусів
serv1.MoveTo(20); // Переміщаємо перший сервопривід у положення 20 градусів
serv2.MoveTo(220); // Переміщаємо другий сервопривід у положення 220 градусів
// Через обмеження на максимальне переміщення сервопривід
// Повернеться до 160 градусів і зупиниться
}
void loop()
{
}
Тепер ми можемо не боятися, що дамо команду на неправильне переміщення та сервопривід уткнеться у перешкоду. Достатньо один раз обмежити переміщення при ініціалізації.