 Книжки
Книжки Техніка
Техніка Електроніка
Електроніка Двигуни постійного струму
Двигуни постійного струму Контролери Raspberry Pi
Контролери Raspberry Pi  Реле
Реле Датчик температури
Датчик температури Усі теги
Усі теги Програмування
Програмування Веб-інтерфейс
Веб-інтерфейс Графічний інтерфейс
Графічний інтерфейс Віконна програма
Віконна програма Відео
Відео Зображення
Зображення Аудіо
Аудіо Тексти
Тексти HTML
HTML Лог-файли
Лог-файли Нейронні мережі
Нейронні мережі Озброєння
Озброєння Проекти
ПроектиСтворення власної бібліотеки керування двигуном постійного струму
Серія-статей: Ардуїно, використання двигунів постійного струму #4
Отже, заходимо до папки Перший файл, Скопіюємо у файл /* Користувальницька бібліотека управління сервоприводами, заголовковий файл */
#ifndef MotorS // Якщо бібліотека ще не була підключена
#define MotorS // Підключити її
#include "Arduino.h" // Використовуємо стандартну бібліотеку Arduino
class MotorClass
{
public:
byte pinE; // Номер цифрового виходу для управління швидкістю – повинен підтримувати ШІМ
byte pinI; // Номер цифрового виходу керувати напрямом обертання
boolean SpeedChanging; // Чи увімкнено режим прискорення двигуна (обробляється функцією UpdateSpeed())
unsigned long StartTimer; // Таймер для плавного запуску
int StartTimeStep; // Інтервал зміни потужності двигуна, мс
int StartPowerStep; // Один крок зміни потужності двигуна
int ReqPower; // До якого закінчення змінюватиметься потужність двигуна
int Power; // Потужність двигуна (0 - зупинка, 255 - повна потужність)
int Direction; // Напрямок обертання
MotorClass(int pE, int pI); // Конструктор класу. Перший аргумент – номер піна управління швидкістю, другий – напрямком
void RunMotor(int motorpower); // Задаємо швидко і напрямки обертання двигуна
// Негативне значення - обертання у зворотний бік
void SetSpeed(int newspeed); // Встановлюємо швидкість двигуна у відсотках максимуму.
void SetSpeed(int newspeed, int smooth); // Плавно змінюємо швидкість двигуна у відсотках від максимуму.
// Негативне значення - обертання у зворотний бік
// Плавність зміни регулюється значенням smooth (час на один крок зміни швидкості, мс)
void UpdateSpeed(); // Обробка дій, які мають проводитися із затримкою, зокрема плавної зміни швидкості
};
#endif
При створенні бібліотеки можна побачити деякі особливості:
Файл починається з директиви Крім того ми визначаємо кілька функцій з одним ім'ям та різними аргументами. Це пов'язано з тим, що при використанні бібліотек виклик функції з меншою, ніж визначено кількістю аргументів призведе до помилок. Задати значення аргументів за умовчанням не вдасться, точніше для кожного випадку потрібно буде описати окрему функцію. Тому у нас по дві функції Тепер залишилося розібратися із файлом /* Користувальницька бібліотека управління сервоприводами */
#include "MotorS.h" // Підключаємо заголовний файл
MotorClass:: MotorClass (int pE, int pI) // Конструктор класу. Перший аргумент - номер піна управління швидкістю, другий - напрямом
{
pinE = pE; // Задаємо керуючі піни для швидкості
pinI = pI; // І напрямки обертання
pinMode (pinE, OUTPUT); // Задаємо роботу відповідних пінів як виходи
pinMode (pinI, OUTPUT);
Power = 0; // за умовчанням двигун стоїть
SpeedChanging=false; // За умовчанням двигун не пришвидшується
}
void MotorClass::RunMotor(int motorpower) // Задаємо швидкість і напрямки обертання двигуна
// Негативне значення - обертання у зворотний бік
{
Direction=(motorpower>0)?HIGH:LOW; // Якщо вказано позитивну швидкість - на вихід напрямку подається сигнал HIGH
digitalWrite(pinI,Direction); // для негативної – LOW
digitalWrite(pinE,abs(Power)); // Подаємо на вихід керування швидкістю сигнал, який відповідає потрібній швидкості
}
MotorClass::SetSpeed(int newspeed) // Встановлюємо швидкість двигуна у відсотках від максимуму.
{
Power=(int)newspeed/2.55; // Оскільки швидкість змінюється від 0 дл 100%, а потужність - в діапазоні від 0 до 255,
// обчислюємо необхідне значення потужності
RunMotor(Power);
}
MotorClass::SetSpeed(int newspeed, int smooth) // Плавно змінюємо швидкість двигуна у відсотках від максимуму.
// Негативне значення - обертання у зворотний бік
// Плавність зміни регулюється значенням smooth (час на один крок зміни швидкості, мс)
{
ReqPower=(int)newspeed/2.55; // Оскільки швидкість змінюється від 0 дл 100%, а потужність – у діапазоні від 0 до 255, обчислюємо потрібне значення
if (ReqPower>=Power) // У який бік змінюватиметься потужність?
StartPowerStep=1; // збільшуватись на 1 (1/255 від повної)
else
StartPowerStep=-1; // зменшуватись на 1 (1/255 від повної)
StartTimeStep=smooth;
StartTimer=millis(); // Починаємо відлік часу зміни швидкості
SpeedChanging=true; // встановлюємо режим зміни швидкості, для подальшої обробки функції UpdateSpeed()
}
void MotorClass::UpdateSpeed() // Обробка дій, які повинні проводитися із затримкою,
{
if (SpeedChanging) // Якщо встановлено режим зміни швидкості
if ((millis()-StartTimer)>= StartTimeStep) // Якщо з попередньої зміни швидкості пройшло більше часу, ніж задано
{
if (Power! = ReqPower) // Поки не досягли потрібної швидкості
{
Power+=StartPowerStep; // міняємо швидкість
RunMotor(Power); // даємо команду двигуну
StartTimer=millis(); // встановлюємо таймер для початку відліку для наступного зміни потужності
}
else // Якщо потрібна швидкість досягнута
SpeedChanging=false; // Вимикаємо режим зміни швидкості
}
}
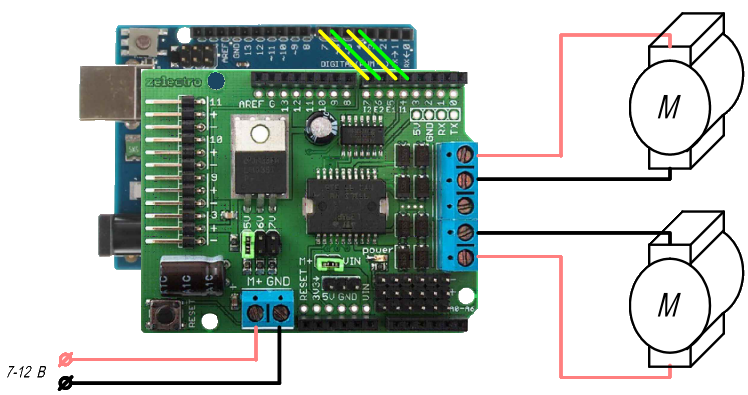
Для використання нашої бібліотеки скористаємося попереднім прикладом, в якому ми підключали два двигуни:
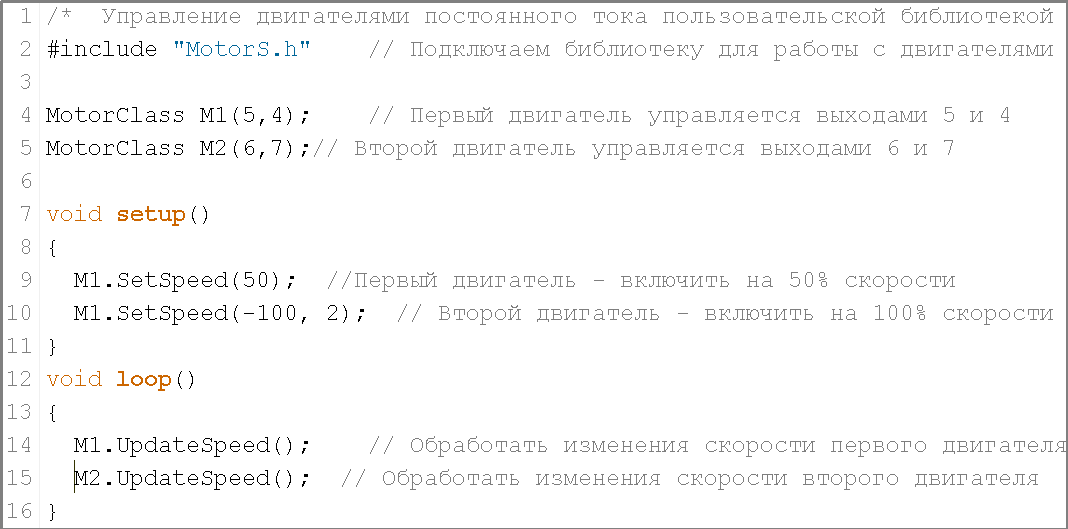
У коді програми всю частину, яка відповідала за опис нашого класу MotorClass, замінимо на функцію підключення бібліотеки /* Управління двигунами постійного струму користувальницькою бібліотекою з підтримкою плавної зміни швидкості */
#include "MotorS.h" // Підключаємо бібліотеку для роботи з двигунами постійного струму
MotorClass M1(5,4); // Перший двигун управляється виходами 5 і 4 (швидкість та напрямок відповідно)
MotorClass M2(6,7); // Другий двигун управляється виходами 6 та 7
void setup()
{
M1.SetSpeed(50); //Перший двигун - увімкнути на 50% швидкості
M1.SetSpeed(-100, 2); // Другий двигун - увімкнути на 100% швидкості плавно
}
void loop()
{
M1.UpdateSpeed(); // Обробити зміни швидкості першого двигуна
M2.UpdateSpeed(); // Обробити зміни швидкості другого двигуна
}
Результат роботи програми, порівняно із звичайним використанням класу, не змінився – перший двигун максимально швидко розженеться до половини максимальної швидкості, другий обертатиметься у зворотний бік, причому на розгін з нуля до максимуму у нього піде пів секунди.
Залишилося лише подбати про підсвічування створених нами функцій Arduino IDE. Для цього зробимо в папці з нашою бібліотекою файл Помістимо туди інформацію про ключові слова, які потрібно підсвічувати:
# Підсвічування синтаксису для бібліотеки MotorS
MotorClass KEYWORD1
RunMotor KEYWORD2
SetSpeed KEYWORD2
UpdateSpeed KEYWORD2
Між словом та його типом ставиться знак табуляції, між рядками – переклад рядка.
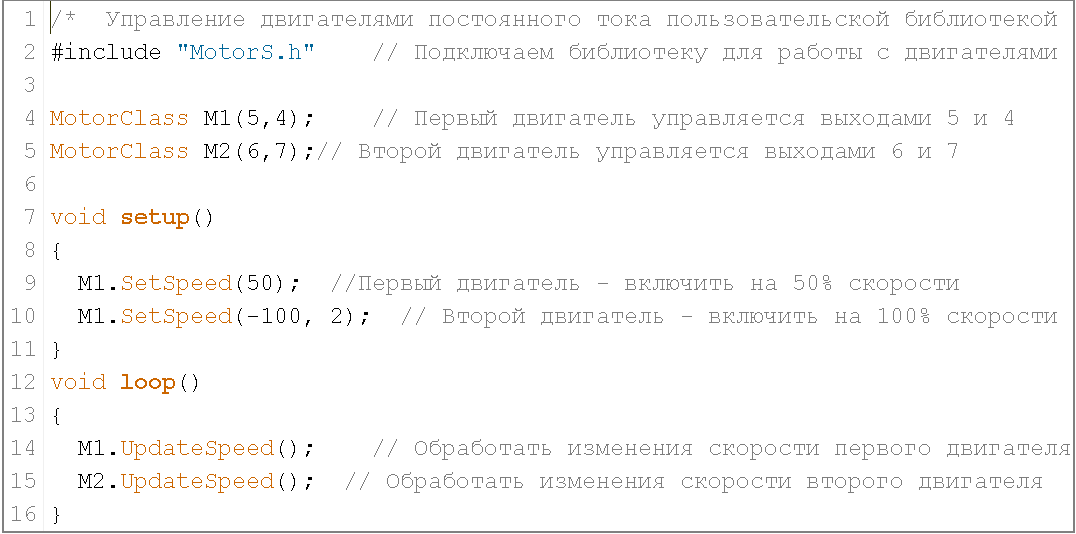
Знову перезавантажимо Arduino IDE, тепер наш клас та його функції підсвічуються відповідним кольором:
Без За допомогою Тепер код більш розбірливий, а використання власноруч створеної бібліотеки нічим не відрізняється від використання стандартних бібліотек/libraries нашого середовища розробки Arduino, і бачимо 10-15 папок, кожна з яких відвіяє за стандартну бібліотеку Arduino. Створимо тут папку для нашої бібліотеки, наприклад MotorS (шлях до неї має виглядати приблизно як “/Arduino/libraries/MotorS/"). Усередині цієї папки створимо два файли: MotorS.h, MotorS.cpp. з++ або у звичайному текстовому редакторі з підсвічуванням синтаксису, наприклад, AkelPad.
MotorS.h – заголовний файл (від слова header file), тут описуватимуться сам клас, змінні та функції. При цьому тут мають лише список змінних і функцій та їх типів, без тіла самих функцій.
MotorS.h наш клас MotorClass, точніше лише змінні та назви функцій:
#ifndef ServoS, яка перевіряє, чи не було підключено цю бібліотеку раніше. Якщо ми ніде раніше її не підключали, то до програми буде додано код, що знаходиться між #define MotorS та #endif
SetSpeed(int newspeed) та SetSpeed(int newspeed, int smooth)
MotorS.cpp. Тут знаходиться код для описаних у заголовному файлі функцій. При цьому нам потрібно вказувати, до якого класу відносяться функції, що викликаються. Оскільки в нашій бібліотеці використовується клас MotorClass, всі функції будуть ставитися до нього. У випадку конструктора, ім'я якого збігається з ім'ям класу, це буде виглядати як MotorClass:: MotorClass (), решта функцій – відповідно MotorClass::Ім'яФункції();
#include "MotorS.h". Розмір даних, що завантажуються в контролер, практично не зміниться (адже ми, фактично, додаємо код з бібліотеки до того, який відображається в полі редагування). Але працювати з такою програмою набагато простіше, адже не потрібно щоразу, коли ми хочемо керувати двигунами, копіювати всі керуючі змінні та функції.
keywords.txt (шлях до нього має виглядати приблизно як “/Arduino/libraries/MotorS/keywords.txt”) У цей файл запишемо назви нашого класу та його методу , помітивши їх «KEYWORD1 для імені класу та «KEYWORD2» для методів:
keywords.txt:
keywords.txt:
Еще:
Похожие: