 Книжки
Книжки Техніка
Техніка Електроніка
Електроніка Двигуни постійного струму
Двигуни постійного струму Контролери Raspberry Pi
Контролери Raspberry Pi  Реле
Реле Датчик температури
Датчик температури Ангалогові датчики
Ангалогові датчики Цифрові датчики
Цифрові датчики АЦП
АЦП Bluetooth
Bluetooth Радіозв'язок 2,4ГГц
Радіозв'язок 2,4ГГц LCD-дісплей
LCD-дісплей Усі теги
Усі теги Програмування
Програмування Веб-інтерфейс
Веб-інтерфейс Графічний інтерфейс
Графічний інтерфейс Віконна програма
Віконна програма Відео
Відео Зображення
Зображення Аудіо
Аудіо Тексти
Тексти HTML
HTML Лог-файли
Лог-файли Нейронні мережі
Нейронні мережі Озброєння
Озброєння Проекти
ПроектиГіроскопічний вимірювач динамічних характеристик автомобіля
Система вимірювання динамічних характеристик автомобіля на тривісному акселерометрі/гіроскопі.
Пасивна система, яка не потребує підключення до бортового комп'ютера автомобіля, досить жорстко встановити її всередині салону.
Після включення система починає отримувати дані про прискорення та повороти в реальному часі, на основі яких формує відносні дані про рух, поворот, швидкість і прискорення. Дані передаються на ПК через USB-з'єднання (емуляція COM-порту) і обробляються додатком, що управляє. Далі дані відображаються у графічному вигляді з можливістю збереження журналу, відкриття раніше проведених вимірювань та розрахунку динамічних характеристик
Після включення системи автомобіль виконує маневри (розгін, гальмування тощо), під час яких відбувається запис даних.
Період часу, який цікавить тестера, можна вибрати (як для поточного виміру, так і після відкриття раніше збережених журналів більш ранніх вимірів). Після цього на основі даних про переміщення розраховуються дані про динаміку автомобіля (пройдена відстань, швидкість, прискорення, обороти двигуна, потужність тощо)
Функції:
- Виявлення по 3 осях (-X, -Y, -Z) у реальному часі:
- поворот
- прискорення
- Розрахунок динамічних характеристик за певний період часу (розгін/гальмування автомобіля)
- пройдена відстань
- реальна швидкість
- прискорення
- обіг двигуна (на основі заданого передавального числа)
- потужність (залежно від заданої ваги автомобіля)
- Графічне відображення всіх виміряних та розрахованих значень
- Збереження журналів та відкриття раніше збережених даних
- Порівняння кількох тестів (одна й та сама машина або різні машини)
Основні параметри системи:
- Діапазон датчиків кутової швидкості (осі X, Y та Z) ±250, ±500, ±1000, ±2000°/сек.
- Діапазон тривісного акселерометра (осі X, Y та Z) ±2g, ±4g, ±8g, ±16g
- Ударостійкість 10 000 г.
- Підключення датчика до шини I2C контролера
- Підключення контролера до ПК через USB (емуляція COM-порту)
Функції програми керування:
Настільна програма для отримання даних від тривісного акселерометра/гіроскопа. Може працювати на будь-якому ПК з операційною системою, яка підтримує .NET Framework (Windows 7,10,11). Головне вікно містить центральну панель, всі значення можуть відображатись у графічному вигляді.
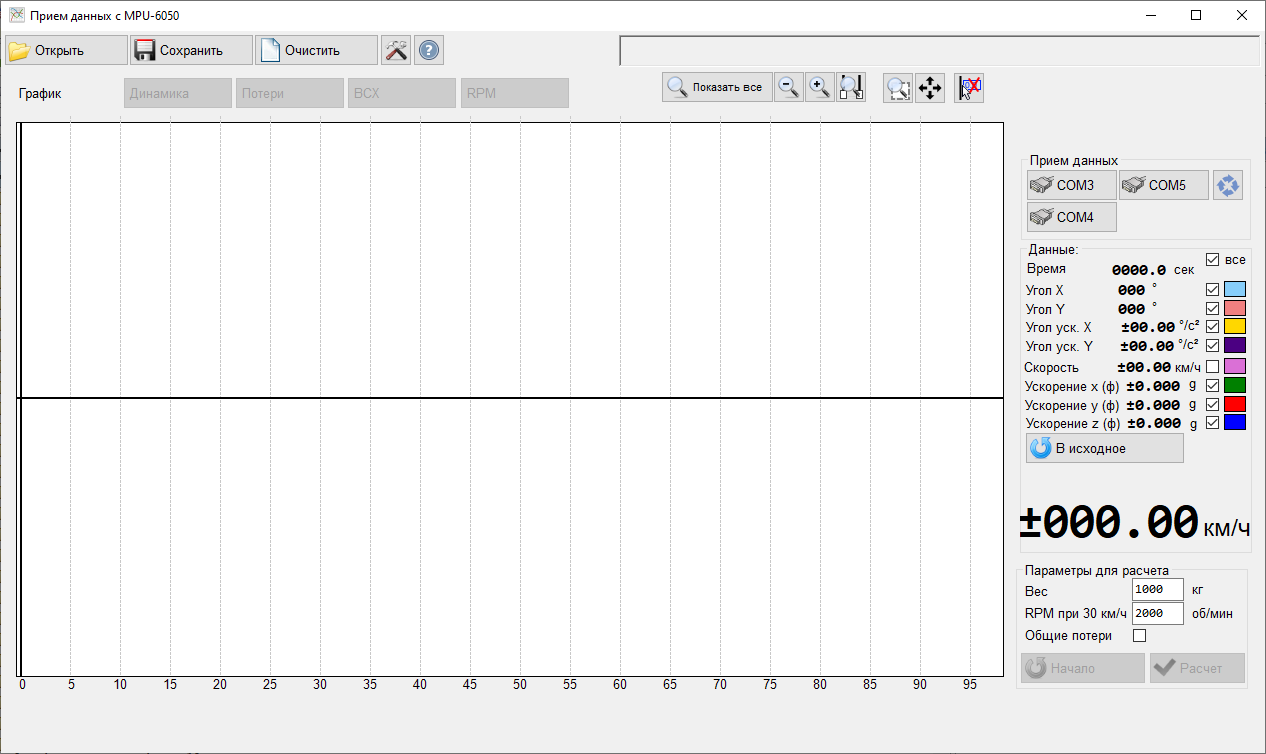
Кнопки у верхньому ряду використовуються для масштабування (можна також використовувати колесо прокручування), скидання масштабу (подвійне клацання середньою кнопкою миші), переміщення поля зору на графіці (можна використовувати середню кнопку миші), показати повзунок з поточними значеннями. Незалежне налаштування стилю відображення ліній для кожного параметра можна застосувати за допомогою панелі у правій частині вікна. Кнопки у верхній частині панелі графіка перемикають основні режими роботи та
- Графічне відображення вхідних даних (кути, швидкості, прискорення)
- Графічне відображення динамічних даних, розрахованих за певний період часу (прискорення/уповільнення)
- Діаграма обертів розрахована за певний період часу (прискорення/уповільнення)
Головне меню включає кнопки збереження та відкриття раніше збережених журналів, параметрів системи, а також консоль з поточними командами, відправленими на контролер, та отриманими відповідями. Окрема панель призначена для вибору порту, до якого буде підключено контролера.
Основні функції програми, що управляє:
- Режим вхідних даних («Графік») Основний режим за промовчанням. Вкажіть поточні значення датчика (при підключеному контролері) або повний графік (з раніше відкритих журналів). Відображення будь-якого з параметрів можна вимкнути або налаштувати самостійно (змінити колір та товщину лінії, вертикальний масштаб)
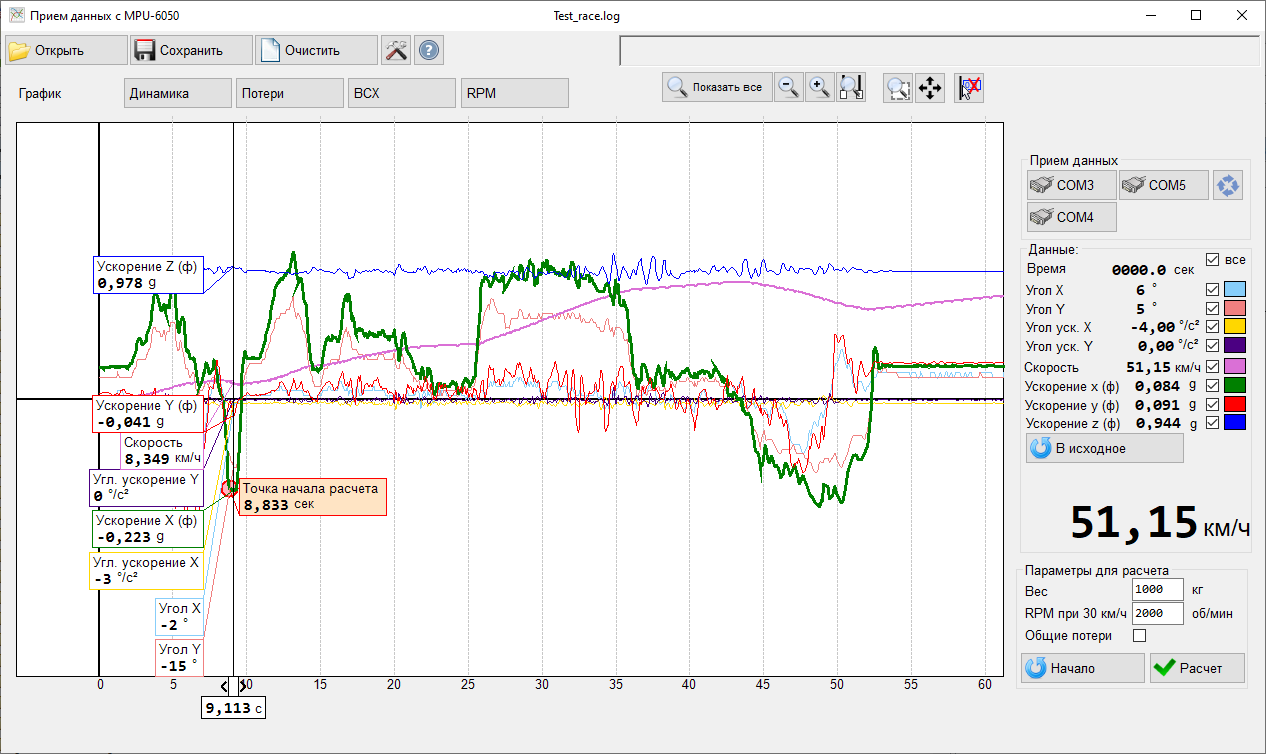
Графічне відображення наступних вхідних даних:
- Час (з початку тесту)
- Кут (-X, -Y)
- Кутове прискорення (-X, -Y)
- Лінійне прискорення (-X, -Y, -Z)
- Елементи контролю швидкості:
- Кнопка повернення до вихідних значень (скидає параметри перед початком забігу)
- Змінити приблизно. вага автомобіля (використовується для розрахунку потужності)
- Оберти при швидкості 30 км/год (використовуються для розрахунку об/хв)
- Скинути до «початку» заїзду - Розраховується час, з якого швидкість починає збільшуватися (розрахунковий початок гонки). Повторне натискання вибирає наступну точку збільшення швидкісті. Початкову точку можна також вибрати вручну, переміщуючи відповідний повзунок на графіку.
- Кнопка "Розрахувати", яка запускає розрахунок динамічних характеристик на основі раніше обраної "початкової" точки.
- Режим динамічних даних («Динамічний»): активується після вибору періоду тестування (певного періоду часу, протягом якого виконувалося прискорення/гальмування)
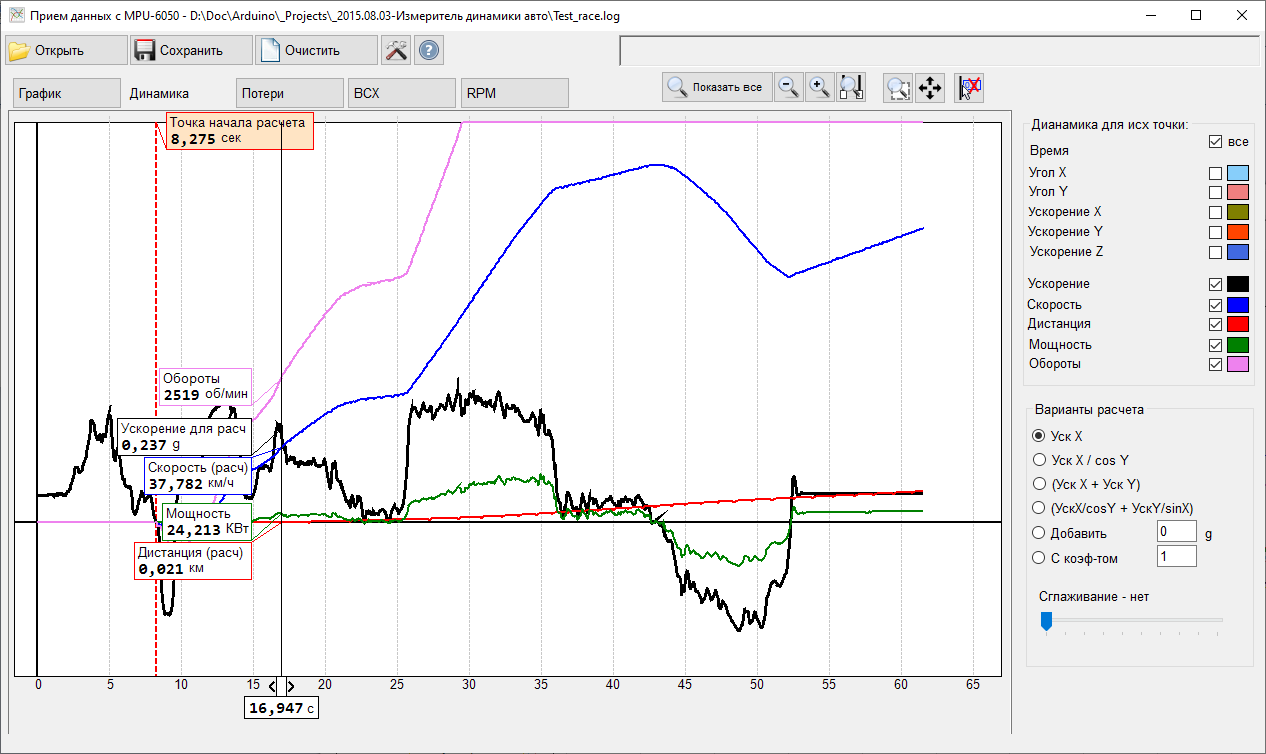
Графічне відображення таких даних:
- Кут (-X, -Y)
- Лінійне прискорення (-X, -Y, -Z)
- Прискорення
- Швидкість
- Відстань
- Потужність (на основі приблизної маси автомобіля, обраної в попередньому режимі)
- Об/хв (на основі еталонного числа обертів за хвилину відповідає 30 км/год, вибраному в попередньому режимі) Елементи керування:
- Вибір різних методів розрахунку прискорення
- «ПрискоренняX» - напрямок руху точно збігається з основною віссю датчика -X
- «Прискорення X/cosY» - Прискорення осі X з уточненням кута нахилу датчика до горизонтальної поверхні Y
- «AccelerationX + AccelerationY» — прискорення розраховується як сума прискорень по обох горизонтальних осях.
- "AccelerationX/cosY + AccelerationY/sinX" — прискорення розраховується як сума прискорень по обох горизонтальних осях з поправкою на кут до горизонтальної площини.
- Додати XXX г з коефіцієнтом XXX – Додаткове регулювання сили тяжіння (для зменшення ефекту неточного розміщення датчика в горизонтальній площині) – абсолютна та відносна корекція.
- Згладжування (повзунок) – змінює ступінь згладжування ліній на графіках, що досягається за рахунок усереднення кількох останніх значень. Дозволяє знизити шум від коливань значень, що не впливає на загальну точність вимірювань. Приклад різних рівнів при згладжуванні для тих самих вихідних даних:

- Режим обертів: відображення діаграми обертів двигуна для вибраного тестового запуску на основі даних про швидкість та еталонні оберти (відповідає 30 км/год), вибраних в основному режимі.
- Контролер Arduino UNO
- Трьохосьовий акселерометр/гіроскоп MPU-6050
- Віддалене підключення (через Bluetooth, ІЧ-порт або радіоканал)
- Додаткові розрахунки на основі необроблених даних.
- Дальші покращення обробки сигналів від датчика та більш точний розрахунок швидкості та прискорення.
- Додати екран та окремі елементи керування, які підключаються безпосередньо до контролера для роботи без підключення до ПК.
- Збереження та відкриття журналів з SD-картки
- Поліпшення зручності використання програми управління.
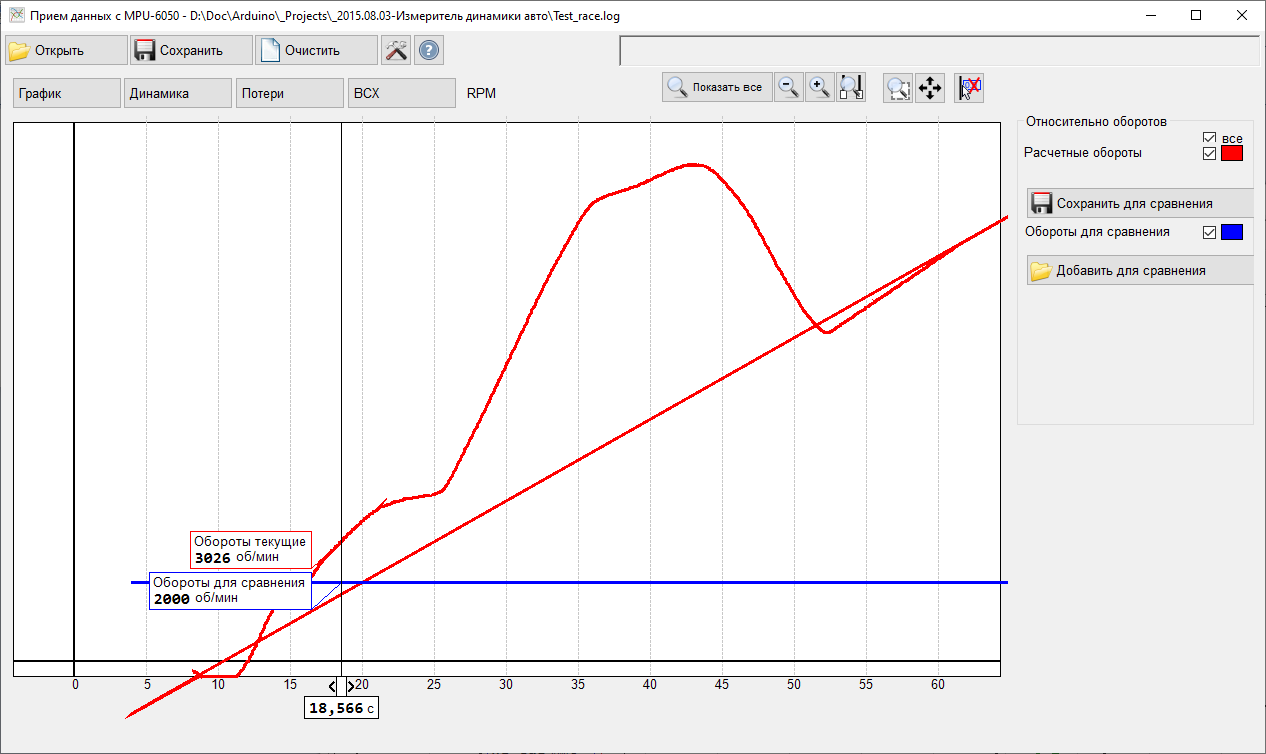
Графіку можна зберегти окремо від основних даних. Раніше збережені журнали гонок можна відкрити, натиснувши кнопку «Додати для порівняння».